Algoritmos
Redes Neurais – Parte 3
Ok, vamos finalmente para a terceira parte sobre Redes Neurais (e também, aonde será apresentado o código completo de uma rede neural em Ruby). Este post será sobre treinamento de redes neurais, especificamente sobre o treinamento dos pesos que saem dos neurônios de entrada e vão para os neurônios ocultos da rede. Antes de mais nada, vamos relembrar nosso desenho da rede neural:

Já vimos no post anterior que para achar o valor que MAXIMIZA a função de custo, usamos o métoodo chamado de “gradiente”. O método “gradiente” usa derivadas parciais, e como vamos achar o valor de um peso que sai do neurônio de entrada para o neurônio da camada oculta, precisamos calcular a derivada parcial da função de custo em relação a um destes pesos. Vamos usar o “peso_a1_b2” para este exemplo.
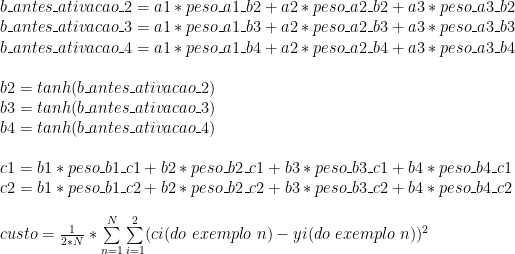
Antes de mais nada, vamos relembrar todas as contas que fazemos para nossa rede neural. Para tal, eu vou usar a notação “peso_ax_by” para indicar o peso que sai do neurônio “ax” e vai para o neurônio “by”. Note que NÃO EXISTE “peso_a1_b1”, porque o neurônio “b1” é o “bias”, logo o valor dele é sempre “1” (e não faria sentido calcular um valor se ele vai descartá-lo e usar “1”, no fim das contas). Sabemos que o valor de um neurônio oculto é a soma de todos os valores dos neurônios de entrada (multiplicados por seus devidos pesos) e aplicadas uma “função de ativação” (que no nosso caso, é a “Tangente Hiperbólica”). Eu vou chamar de “b_sem_ativacao_x” o valor desta soma dos neurônios de entrada, ANTES de se aplicar a função de ativação. Logo, nossas contas são: